




[029] Frequency Response Measurement Part 7: Step-Load Testing
Why step-load testing will not give you the design information that you need.
Introduction
In this article, Dr. Ridley continues the topic of frequency response measurements for switching power supplies. This seventh article discusses the approach of trying to use step-load testing to estimate stability and design the control loop.
Step Load Testing
In the last six articles in this series, the importance of frequency response measurements has been shown. Yet it is still a fact that many power supply designers do not make proper loop gain measurements needed for fast and reliable designs. The reasons are varied—lack of time, knowledge, or budget to purchase the right kind of equipment.
Many old-timers in the industry claim that they can see all the characteristics necessary by just looking at the step-load transient response, and that there is no need to make loop measurements at all. This misconception can often lead to expensive errors in design, long and expensive time delays in product development, and instability in the field.
In these next two articles, we will examine the approach of using step-load responses to see how it does not guarantee proper design of the feedback compensation.
Power Supply Transient Response
If3 a feedback loop has inadequate phase margin, it will result in a system that has complex poles in its transfer functions. There are numerous text books you can read on this topic, relating phase margin of systems to pole locations, but the math involved is beyond the scope of this article. Complex poles can also result from an underdamped system, even without the presence of feedback.
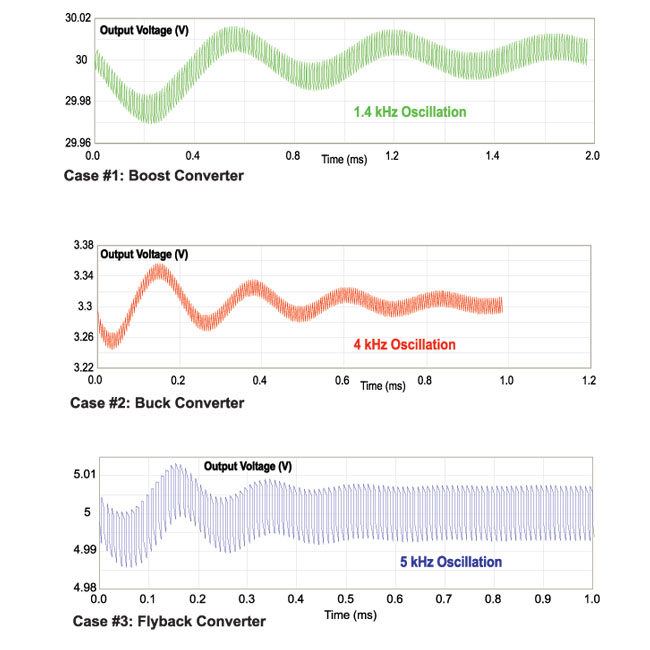
Figure 1: Transient Load Response of Three Different Converters
Figure 1 shows a step load transient response for three different power converters. The waveforms of Figure 1 show damped oscillations with different amplitudes and frequencies. The first converter, a boost supply with current-mode control, has a 1.4 kHz oscillation. The second, a buck converter with voltage-mode control, has a 4 kHz oscillatory response, and the third, a flyback with current-mode, a 5 kHz response.